
Биомеханика. Сохранение положений тела
Страница 1 из 1

Биомеханика. Сохранение положений тела
автор Игорь Вс Мар 19, 2017 11:00 am
Донской Д.Д. Биомеханика с основами спортивной техники. — М.: ФиС, 1971
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.1.) § 43. Равновесие тела и системы тел
В биомеханике двигательные действия человека при занятиях физическими упражнениями рассматриваются как системы движений. Эти движения можно условно разделить на 5 основных групп: сохранение положения тела, движения на месте и вокруг оси, локомоторные и перемещающие движения. Каждая из групп имеет свои характерные закономерности. При изучении двигательных действий как систем движений нужно знать и использовать эти закономерности.
В физических упражнениях человеку нередко необходимо сохранять неподвижное положение тела: например, исходные положения — стартовые; конечные положения — фиксирование штанги после её поднятия и т.п.; промежуточные — упор углом на кольцах и др. Во всех таких случаях тело человека как биомеханическая система находится в равновесии. В равновесии могут находиться и тела, связанные с сохраняющим положение человеком (например, штанга, партнёр в акробатике).
Чтобы сохранить положение тела, человек должен находиться в равновесии. Положение тела определяется его позой*, его ориентацией и местоположением в пространстве, а также отношением к опоре. Следовательно, для сохранения положения тела человеку нужно фиксировать позу и не допускать, чтобы приложенные силы изменили позу и переместили его тело с данного места в каком-либо направлении или вызвали его поворот относительно опоры.
* Поза — взаимно относительное расположение звеньев тела, не зависимое от ориентации и местоположения тела в пространстве и отношения его к опоре.
43.1. Силы уравновешиваемые при сохранении положения
К биомеханической системе приложены силы тяжести, опорной реакции, веса и мышечной тяги партнёра или противника и другие, которые могут быть и возмущающими, и уравновешивающими силами в зависимости от положения звеньев тела относительно их опоры.
Во всех случаях, когда человек сохраняет положение, находится в равновесии изменяемая система тел (не абсолютно твёрдое тело или материальная точка).
В условиях занятий физическими упражнениями при сохранении положения к телу человека чаще всего приложены силы тяжести его тела и веса других тел, а также силы реакции опоры, препятствующие свободному падению. Без участия мышечных тяг сохраняются только пассивные положения (например, положения лёжа на полу, на воде).
При активных положениях система взаимно подвижных тел (звеньев тела) благодаря напряжениям мышц как бы отвердевает, становится подобной единому твёрдому телу; мышцы человека своей статической работой обеспечивают сохранение и позы, и положения в пространстве. Значит, в активных положениях для сохранения равновесия к силам внешним добавляются внутренние силы мышечной тяги.
Все внешние силы делят на возмущающие (опрокидывающие, отклоняющие), которые направлены на изменение положения тела, и уравновешивающие, которыми уравновешивается действие возмущающих сил.
Силы мышечной тяги чаще всего служат силами уравновешивающими. Но в определённых условиях они могут быть и силами возмущающими, т.е. направленными на изменение и позы и расположения тела в пространстве.
43.2. Условия равновесия системы тел
Для равновесия* тела человека (системы тел) необходимо, чтобы главный вектор и главный момент внешних сил были равны нулю, а все внутренние силы обеспечивали сохранение позы (формы системы).
* Следует подчеркнуть, что равновесие при сохранении положения нужно рассматривать не только в случае покоя, но и в случае сохранения позы в движении (например, движение слаломиста по повороту).
Если главный вектор и главный момент равны нулю, тело не сдвинется и не повернётся, его линейное и угловое ускорения равны нулю.
Для системы тел эти условия также необходимы, но уже недостаточны. Равновесие тела человека как системы тел требует ещё сохранения позы тела. Когда мышцы достаточно сильны и человек умеет использовать их силу, он удержится в очень трудном положении. А менее сильному человеку такой позы не удержать, хотя по расположению и величине внешних сил равновесие возможно. У разных людей существуют свои предельные позы, которые они ещё в состоянии сохранять.
43.3. Виды равновесия твёрдого тела
Вид равновесия твёрдого тела определяется по действию силы тяжести в случае сколь угодно малого отклонения: а) безразличное равновесие — действие силы тяжести не изменяется; б) устойчивое — оно всегда возвращает тело в прежнее положение (возникает момент устойчивости); в) неустойчивое — действие силы тяжести всегда вызывает опрокидывание тела (возникает момент опрокидывания); г) ограниченно-устойчивое — до потенциального барьера положение тела восстанавливается (возникает момент устойчивости), после него тело опрокидывается (возникает момент опрокидывания).
В механике твёрдого тела различают три вида равновесия: безразличное, устойчивое и неустойчивое. Эти виды различаются по поведению тела, незначительно отклоняемого от уравновешенного положения. Когда тело человека полностью сохраняет позу («отвердение»), к нему применимы законы равновесия твёрдого тела.
Безразличное равновесие характерно тем, что при любых отклонениях сохраняется равновесие. Шар, цилиндр, круговой конус на горизонтальной плоскости (нижняя опора) можно повернуть как угодно, и они останутся в покое (рис. 50, а). Линия действия силы тяжести (G) в таком теле (или, как говорят, короче линия тяжести) всегда проходит через точку опоры, совпадает с линией действия силы опорной реакции (R); они уравновешивают друг друга. В спортивной технике безразличного равновесия ни на суше, ни в воде практически не встречается.
Устойчивое равновесие характерно возвратом в прежнее положение при любом отклонении. Оно устойчиво при сколь угодно малом отклонении (см. рис. 50, б) по двум причинам; а) центр тяжести тела поднимается выше (Δh), создаётся запас потенциальной энергии в поле земного тяготения; б) линия тяжести (G) не проходит через опору, появляется плечо силы тяжести (d) и возникает момент силы тяжести (момент устойчивости Mуст = Gd), возвращающий тело (с уменьшением потенциальной энергии) в прежнее положение. Такое равновесие встречается у человека при верхней опоре. Например, гимнаст в висе на кольцах; рука, свободно висящая в плечевом суставе. Сила тяжести тела сама возвращает тело в прежнее положение.
Неустойчивое равновесие характерно тем, что сколь угодно малое отклонение вызывает ещё большее отклонение и тело само в прежнее положение вернуться не может (см. рис. 50, в). Таково положение при нижней опоре, когда тело имеет точку или линию (ребро тела) опоры. При отклонении тела: а) центр тяжести опускается ниже (– Δh), убывает потенциальная энергия в поле земного тяготения; б) линия тяжести (G) с отклонением тела удаляется от точки опоры, увеличиваются плечо (d) и момент силы тяжести (момент опрокидывания Мопр = Gd); он всё дальше отклоняет тело от прежнего положения. Неустойчивое равновесие в природе практически почти не осуществимо.
В физических упражнениях чаще всего встречается ещё один вид равновесия, когда имеется площадь опоры, расположенная внизу (нижняя опора) (см. рис. 50, г). При незначительном отклонении тела центр его тяжести поднимается (+ Δh) и появляется момент устойчивости (Mуст = Gd). Налицо признаки устойчивого равновесия; момент силы тяжести тела вернёт его в прежнее положение. Но это продолжается лишь при отклонении до определённых границ, пока линия тяжести не дойдёт до края площади опоры. В этом положении уже возникают условия неустойчивого равновесия: при дальнейшем отклонении тело опрокидывается; при малейшем отклонении в обратную сторону — возвращается в прежнее положение. Границе площади опоры соответствует вершина «потенциального барьера» (максимум потенциальной энергии). В пределах между противоположными барьерами («потенциальная яма») во всех направлениях осуществляется ограниченно-устойчивое равновесие.
На рис. 50 (в нижней части) представлены схематически все четыре вида равновесия шарика на опоре, имеющей форму, которая соответствует рассматриваемому виду равновесия.
43.4. Устойчивость твёрдого тела и системы тел
Устойчивость объекта характеризуется его способностью, противодействуя нарушению равновесия, сохранять положение. Различают статические показатели устойчивости как способность сопротивляться нарушению равновесии и динамические как способность восстановить равновесие.
Статическим показателем устойчивости твёрдого тела служит (в ограниченно-устойчивом равновесии) коэффициент устойчивости. На рис. 51, а опрокидывающий момент создаётся опрокидывающей силой (Fопр), приложенной на плече (h) относительно линии опрокидывания (О), вокруг которой происходит отклонение тела. Момент устойчивости относительно той же линии опрокидывания возникает с начала приложения силы Fопр. Наибольшим он становится в начале опрокидывания (предельный момент устойчивости), далее плечо силы тяжести G уменьшается и момент устойчивости уменьшается до нуля (в граничном положении — ОЦТ над линией опрокидывания).
Коэффициент устойчивости равен отношению предельного момента устойчивости к моменту опрокидывающему. Когда коэффициент устойчивости покоящегося тела равен единице и больше неё, опрокидывания нет. Если же он меньше единицы, равновесие не может быть сохранено.
Однако сопротивление только этих двух механических факторов (двух моментов сил) для системы тел, если она может изменять конфигурацию, не исчерпывает действительной картины. Предположим, что сопротивляющийся борец (рис. 51, г), согнув ноги, опустит строго вертикально центр тяжести своего тела. От этого ни сила тяжести его тела, ни её плечо, а значит, и момент устойчивости не изменятся. Но понизится точка приложения Fопр, плечо этой силы уменьшится, меньше станет её момент. Таким способом борец может увеличить коэффициент устойчивости своего тела путём уменьшения опрокидывающего момента. Отклонив назад тело, он не изменит опрокидывающий момент, но увеличит плечо силы тяжести своего тела и момент устойчивости. Здесь он тоже выиграет в статической устойчивости. Борец, напрягая мышцы и упираясь в ковёр, создаёт ещё внешнюю горизонтальную силу (силу трения), направленную в его сторону, уменьшая этим действие опрокидывающей тяги. Последнее зависит также от готовности мышц борца противодействовать внезапному её приложению. Обманными действиями можно резко ухудшить их готовность и малой тягой вызвать опрокидывание. Самое существенное для биомеханической системы не в пассивном использовании силы тяжести тела, а в активных мышечных тягах, сохраняющих и изменяющих позу тела. В системе тел каждое звено должно быть в равновесии, сохраняя её конфигурацию (позу тела человека).
Следовательно, коэффициент устойчивости тела и зафиксированной системы тел характеризует статическую устойчивость как способность сопротивляться нарушению равновесия. У человека при определении устойчивости всегда надо ещё учитывать активное противодействие мышечных тяг и готовность к сопротивлению.
Динамическим показателем устойчивости твёрдого тела служит угол устойчивости. Это угол, образованный линией действия силы тяжести и прямой, соединяющей центр тяжести с соответствующим краем площади опоры (см. рис. 51, б, в). Станем отклонять тело, пока линия тяжести не дойдёт до границы площади опоры (граничное положение тела — вершина потенциального барьера). У тела, поставленного стоймя (рис. 51, б), база устойчивости (l1) меньше, чем у того же тела, лежащего плашмя (l2) (см. рис. 51, в). Значит, линия тяжести ближе к границе, за которой начнётся опрокидывание. Центр тяжести надо поднять для опрокидывания в первом случае на меньшую высоту (Δh1), чем во втором (Δh2). Угол устойчивости в первом случае (α1) явно меньше, чем во втором (α2).
Физический смысл угла устойчивости состоит в том, что он равен углу поворота (φ), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах ещё восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Сумма двух углов устойчивости в одной плоскости рассматривается как угол равновесия в этой плоскости. Он характеризует запас устойчивости в данной плоскости, т.е. определяет размах перемещений центра тяжести до возможного опрокидывания в ту или другую сторону (например, у слаломиста при спуске на лыжах, гимнастки на бревне, борца в стойке).
В случае равновесия биомеханической системы для применения динамических показателей устойчивости нужно учесть существенные уточнения.
Во-первых, площадь эффективной опоры человека не всегда совпадает с поверхностью опоры. У человека, как и у твёрдого тела, поверхность опоры ограничена линиями, соединяющими крайние точки опоры (или внешние края нескольких площадей опоры) (см. рис. 51, д). Но у человека часто граница площади эффективной опоры расположена внутри контура опоры, так как мягкие ткани (стопа босиком) или слабые звенья (концевые фаланги пальцев в стойке на руках на полу) не могут уравновесить нагрузку. Поэтому линия опрокидывания смещается кнутри от края опорной поверхности, площадь эффективной опоры меньше площади опорной поверхности.
Во-вторых, человек никогда не отклоняется всем телом относительно линии опрокидывания (как кубик), а перемещается относительно осей каких-либо суставов, не сохраняя полностью позы (например, при положении стоя — движения в голеностопных суставах).
В-третьих, при приближении к граничному положению нередко становится трудно сохранить позу и наступает не просто опрокидывание «отвердевшего тела» вокруг линии опрокидывания, а изменение позы с падением. Это существенно отличается от отклонения и опрокидывания твёрдого тела вокруг грани опрокидывания (кантование).
Таким образом, углы устойчивости в ограниченно-устойчивом равновесии характеризуют динамическую устойчивость как способность восстановить равновесие. При определении устойчивости тела человека необходимо также учитывать границы площади эффективной опоры, надёжность сохранения позы до граничного положения тела и реальную линию опрокидывания.
В физических упражнениях часто встречается удерживающая связь (жёсткая). Тогда условия сохранения равновесия требуют учёта двусторонней связи путём рассмотрения соответствующих реактивных сил, вызванных такой связью.
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.1.) § 43. Равновесие тела и системы тел
Часть 2
БИОМЕХАНИКА ФИЗИЧЕСКИХ УПРАЖНЕНИЙ
В биомеханике двигательные действия человека при занятиях физическими упражнениями рассматриваются как системы движений. Эти движения можно условно разделить на 5 основных групп: сохранение положения тела, движения на месте и вокруг оси, локомоторные и перемещающие движения. Каждая из групп имеет свои характерные закономерности. При изучении двигательных действий как систем движений нужно знать и использовать эти закономерности.
Глава 6
СОХРАНЕНИЕ ПОЛОЖЕНИЙ ТЕЛА
В физических упражнениях человеку нередко необходимо сохранять неподвижное положение тела: например, исходные положения — стартовые; конечные положения — фиксирование штанги после её поднятия и т.п.; промежуточные — упор углом на кольцах и др. Во всех таких случаях тело человека как биомеханическая система находится в равновесии. В равновесии могут находиться и тела, связанные с сохраняющим положение человеком (например, штанга, партнёр в акробатике).
РАВНОВЕСИЕ ТЕЛА ЧЕЛОВЕКА
§ 43. РАВНОВЕСИЕ ТЕЛА И СИСТЕМЫ ТЕЛ
Чтобы сохранить положение тела, человек должен находиться в равновесии. Положение тела определяется его позой*, его ориентацией и местоположением в пространстве, а также отношением к опоре. Следовательно, для сохранения положения тела человеку нужно фиксировать позу и не допускать, чтобы приложенные силы изменили позу и переместили его тело с данного места в каком-либо направлении или вызвали его поворот относительно опоры.
* Поза — взаимно относительное расположение звеньев тела, не зависимое от ориентации и местоположения тела в пространстве и отношения его к опоре.
43.1. Силы уравновешиваемые при сохранении положения
К биомеханической системе приложены силы тяжести, опорной реакции, веса и мышечной тяги партнёра или противника и другие, которые могут быть и возмущающими, и уравновешивающими силами в зависимости от положения звеньев тела относительно их опоры.
Во всех случаях, когда человек сохраняет положение, находится в равновесии изменяемая система тел (не абсолютно твёрдое тело или материальная точка).
В условиях занятий физическими упражнениями при сохранении положения к телу человека чаще всего приложены силы тяжести его тела и веса других тел, а также силы реакции опоры, препятствующие свободному падению. Без участия мышечных тяг сохраняются только пассивные положения (например, положения лёжа на полу, на воде).
При активных положениях система взаимно подвижных тел (звеньев тела) благодаря напряжениям мышц как бы отвердевает, становится подобной единому твёрдому телу; мышцы человека своей статической работой обеспечивают сохранение и позы, и положения в пространстве. Значит, в активных положениях для сохранения равновесия к силам внешним добавляются внутренние силы мышечной тяги.
Все внешние силы делят на возмущающие (опрокидывающие, отклоняющие), которые направлены на изменение положения тела, и уравновешивающие, которыми уравновешивается действие возмущающих сил.
Силы мышечной тяги чаще всего служат силами уравновешивающими. Но в определённых условиях они могут быть и силами возмущающими, т.е. направленными на изменение и позы и расположения тела в пространстве.
43.2. Условия равновесия системы тел
Для равновесия* тела человека (системы тел) необходимо, чтобы главный вектор и главный момент внешних сил были равны нулю, а все внутренние силы обеспечивали сохранение позы (формы системы).
* Следует подчеркнуть, что равновесие при сохранении положения нужно рассматривать не только в случае покоя, но и в случае сохранения позы в движении (например, движение слаломиста по повороту).
Если главный вектор и главный момент равны нулю, тело не сдвинется и не повернётся, его линейное и угловое ускорения равны нулю.
Для системы тел эти условия также необходимы, но уже недостаточны. Равновесие тела человека как системы тел требует ещё сохранения позы тела. Когда мышцы достаточно сильны и человек умеет использовать их силу, он удержится в очень трудном положении. А менее сильному человеку такой позы не удержать, хотя по расположению и величине внешних сил равновесие возможно. У разных людей существуют свои предельные позы, которые они ещё в состоянии сохранять.
43.3. Виды равновесия твёрдого тела
Вид равновесия твёрдого тела определяется по действию силы тяжести в случае сколь угодно малого отклонения: а) безразличное равновесие — действие силы тяжести не изменяется; б) устойчивое — оно всегда возвращает тело в прежнее положение (возникает момент устойчивости); в) неустойчивое — действие силы тяжести всегда вызывает опрокидывание тела (возникает момент опрокидывания); г) ограниченно-устойчивое — до потенциального барьера положение тела восстанавливается (возникает момент устойчивости), после него тело опрокидывается (возникает момент опрокидывания).
В механике твёрдого тела различают три вида равновесия: безразличное, устойчивое и неустойчивое. Эти виды различаются по поведению тела, незначительно отклоняемого от уравновешенного положения. Когда тело человека полностью сохраняет позу («отвердение»), к нему применимы законы равновесия твёрдого тела.
Безразличное равновесие характерно тем, что при любых отклонениях сохраняется равновесие. Шар, цилиндр, круговой конус на горизонтальной плоскости (нижняя опора) можно повернуть как угодно, и они останутся в покое (рис. 50, а). Линия действия силы тяжести (G) в таком теле (или, как говорят, короче линия тяжести) всегда проходит через точку опоры, совпадает с линией действия силы опорной реакции (R); они уравновешивают друг друга. В спортивной технике безразличного равновесия ни на суше, ни в воде практически не встречается.
Устойчивое равновесие характерно возвратом в прежнее положение при любом отклонении. Оно устойчиво при сколь угодно малом отклонении (см. рис. 50, б) по двум причинам; а) центр тяжести тела поднимается выше (Δh), создаётся запас потенциальной энергии в поле земного тяготения; б) линия тяжести (G) не проходит через опору, появляется плечо силы тяжести (d) и возникает момент силы тяжести (момент устойчивости Mуст = Gd), возвращающий тело (с уменьшением потенциальной энергии) в прежнее положение. Такое равновесие встречается у человека при верхней опоре. Например, гимнаст в висе на кольцах; рука, свободно висящая в плечевом суставе. Сила тяжести тела сама возвращает тело в прежнее положение.
Неустойчивое равновесие характерно тем, что сколь угодно малое отклонение вызывает ещё большее отклонение и тело само в прежнее положение вернуться не может (см. рис. 50, в). Таково положение при нижней опоре, когда тело имеет точку или линию (ребро тела) опоры. При отклонении тела: а) центр тяжести опускается ниже (– Δh), убывает потенциальная энергия в поле земного тяготения; б) линия тяжести (G) с отклонением тела удаляется от точки опоры, увеличиваются плечо (d) и момент силы тяжести (момент опрокидывания Мопр = Gd); он всё дальше отклоняет тело от прежнего положения. Неустойчивое равновесие в природе практически почти не осуществимо.
В физических упражнениях чаще всего встречается ещё один вид равновесия, когда имеется площадь опоры, расположенная внизу (нижняя опора) (см. рис. 50, г). При незначительном отклонении тела центр его тяжести поднимается (+ Δh) и появляется момент устойчивости (Mуст = Gd). Налицо признаки устойчивого равновесия; момент силы тяжести тела вернёт его в прежнее положение. Но это продолжается лишь при отклонении до определённых границ, пока линия тяжести не дойдёт до края площади опоры. В этом положении уже возникают условия неустойчивого равновесия: при дальнейшем отклонении тело опрокидывается; при малейшем отклонении в обратную сторону — возвращается в прежнее положение. Границе площади опоры соответствует вершина «потенциального барьера» (максимум потенциальной энергии). В пределах между противоположными барьерами («потенциальная яма») во всех направлениях осуществляется ограниченно-устойчивое равновесие.
На рис. 50 (в нижней части) представлены схематически все четыре вида равновесия шарика на опоре, имеющей форму, которая соответствует рассматриваемому виду равновесия.
43.4. Устойчивость твёрдого тела и системы тел
Устойчивость объекта характеризуется его способностью, противодействуя нарушению равновесия, сохранять положение. Различают статические показатели устойчивости как способность сопротивляться нарушению равновесии и динамические как способность восстановить равновесие.
Статическим показателем устойчивости твёрдого тела служит (в ограниченно-устойчивом равновесии) коэффициент устойчивости. На рис. 51, а опрокидывающий момент создаётся опрокидывающей силой (Fопр), приложенной на плече (h) относительно линии опрокидывания (О), вокруг которой происходит отклонение тела. Момент устойчивости относительно той же линии опрокидывания возникает с начала приложения силы Fопр. Наибольшим он становится в начале опрокидывания (предельный момент устойчивости), далее плечо силы тяжести G уменьшается и момент устойчивости уменьшается до нуля (в граничном положении — ОЦТ над линией опрокидывания).
Коэффициент устойчивости равен отношению предельного момента устойчивости к моменту опрокидывающему. Когда коэффициент устойчивости покоящегося тела равен единице и больше неё, опрокидывания нет. Если же он меньше единицы, равновесие не может быть сохранено.
Однако сопротивление только этих двух механических факторов (двух моментов сил) для системы тел, если она может изменять конфигурацию, не исчерпывает действительной картины. Предположим, что сопротивляющийся борец (рис. 51, г), согнув ноги, опустит строго вертикально центр тяжести своего тела. От этого ни сила тяжести его тела, ни её плечо, а значит, и момент устойчивости не изменятся. Но понизится точка приложения Fопр, плечо этой силы уменьшится, меньше станет её момент. Таким способом борец может увеличить коэффициент устойчивости своего тела путём уменьшения опрокидывающего момента. Отклонив назад тело, он не изменит опрокидывающий момент, но увеличит плечо силы тяжести своего тела и момент устойчивости. Здесь он тоже выиграет в статической устойчивости. Борец, напрягая мышцы и упираясь в ковёр, создаёт ещё внешнюю горизонтальную силу (силу трения), направленную в его сторону, уменьшая этим действие опрокидывающей тяги. Последнее зависит также от готовности мышц борца противодействовать внезапному её приложению. Обманными действиями можно резко ухудшить их готовность и малой тягой вызвать опрокидывание. Самое существенное для биомеханической системы не в пассивном использовании силы тяжести тела, а в активных мышечных тягах, сохраняющих и изменяющих позу тела. В системе тел каждое звено должно быть в равновесии, сохраняя её конфигурацию (позу тела человека).
Следовательно, коэффициент устойчивости тела и зафиксированной системы тел характеризует статическую устойчивость как способность сопротивляться нарушению равновесия. У человека при определении устойчивости всегда надо ещё учитывать активное противодействие мышечных тяг и готовность к сопротивлению.
Динамическим показателем устойчивости твёрдого тела служит угол устойчивости. Это угол, образованный линией действия силы тяжести и прямой, соединяющей центр тяжести с соответствующим краем площади опоры (см. рис. 51, б, в). Станем отклонять тело, пока линия тяжести не дойдёт до границы площади опоры (граничное положение тела — вершина потенциального барьера). У тела, поставленного стоймя (рис. 51, б), база устойчивости (l1) меньше, чем у того же тела, лежащего плашмя (l2) (см. рис. 51, в). Значит, линия тяжести ближе к границе, за которой начнётся опрокидывание. Центр тяжести надо поднять для опрокидывания в первом случае на меньшую высоту (Δh1), чем во втором (Δh2). Угол устойчивости в первом случае (α1) явно меньше, чем во втором (α2).
Физический смысл угла устойчивости состоит в том, что он равен углу поворота (φ), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах ещё восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Сумма двух углов устойчивости в одной плоскости рассматривается как угол равновесия в этой плоскости. Он характеризует запас устойчивости в данной плоскости, т.е. определяет размах перемещений центра тяжести до возможного опрокидывания в ту или другую сторону (например, у слаломиста при спуске на лыжах, гимнастки на бревне, борца в стойке).
В случае равновесия биомеханической системы для применения динамических показателей устойчивости нужно учесть существенные уточнения.
Во-первых, площадь эффективной опоры человека не всегда совпадает с поверхностью опоры. У человека, как и у твёрдого тела, поверхность опоры ограничена линиями, соединяющими крайние точки опоры (или внешние края нескольких площадей опоры) (см. рис. 51, д). Но у человека часто граница площади эффективной опоры расположена внутри контура опоры, так как мягкие ткани (стопа босиком) или слабые звенья (концевые фаланги пальцев в стойке на руках на полу) не могут уравновесить нагрузку. Поэтому линия опрокидывания смещается кнутри от края опорной поверхности, площадь эффективной опоры меньше площади опорной поверхности.
Во-вторых, человек никогда не отклоняется всем телом относительно линии опрокидывания (как кубик), а перемещается относительно осей каких-либо суставов, не сохраняя полностью позы (например, при положении стоя — движения в голеностопных суставах).
В-третьих, при приближении к граничному положению нередко становится трудно сохранить позу и наступает не просто опрокидывание «отвердевшего тела» вокруг линии опрокидывания, а изменение позы с падением. Это существенно отличается от отклонения и опрокидывания твёрдого тела вокруг грани опрокидывания (кантование).
Таким образом, углы устойчивости в ограниченно-устойчивом равновесии характеризуют динамическую устойчивость как способность восстановить равновесие. При определении устойчивости тела человека необходимо также учитывать границы площади эффективной опоры, надёжность сохранения позы до граничного положения тела и реальную линию опрокидывания.
В физических упражнениях часто встречается удерживающая связь (жёсткая). Тогда условия сохранения равновесия требуют учёта двусторонней связи путём рассмотрения соответствующих реактивных сил, вызванных такой связью.
Последний раз редактировалось: Игорь (Вс Мар 19, 2017 11:32 am), всего редактировалось 1 раз(а)
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18

Игорь- Сообщения : 193
Дата регистрации : 2017-02-18

Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Re: Биомеханика. Сохранение положений тела
автор Игорь Вс Мар 19, 2017 11:22 am
Донской Д.Д. Биомеханика с основами спортивной техники. — М.: ФиС, 1971
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.2.) § 44. Сохранение и восстановление положения тела человека
Человек может не только сохранять равновесие, по и восстанавливать его в случаях нарушения. Отличие равновесия биомеханических систем от равновесия твёрдых физических тел заключается не в наличии особых законов механики для живых систем, а в более сложном их использовании благодаря особенностям живых систем.
44.1. Пассивное и активное уравновешивание
Уравновешивание происходит в неживых системах только пассивно, а в живых организмах — главным образом активно. Уравновешивающие силы могут действовать как собственно уравновешивающие, а также как и останавливающие отклонение и восстанавливающие положение.
В идеальных условиях в покое при равновесии физического тела все приложенные силы постоянны по величине, они уравновешены и тело сохраняет полный покой в инерциальной системе координат. При покое тела в неинерциальной системе отсчёта анализ равновесия осложняется необходимостью учёта фиктивных сил инерции. Но и в этом случае для неживых физических тел уравновешивание сил происходит чисто механически — пассивно.
В реальных условиях внешние силы нередко изменяются, и даже такой объект, как Останкинская телевизионная башня, сохраняя равновесие, при сильном ветре (переменная сила) не остаётся полностью неподвижным. Возмущающие силы вызывают деформации. И если действие возмущающих сил изменяется, то и противоположное действие уравновешивающих сил может измениться. Ветер деформирует Останкинскую башню; возникают силы упругой деформации, останавливающие отклонения, а потом и восстанавливающие её форму; башня при ветре раскачивается.
Пассивное уравновешивание сил происходит не только при полном покое, но и при возможных отклонениях (колебаниях).
Живые организмы, в том числе и человек, уравновешивают внешние силы не только пассивно, но и активно — силами мышечной тяги. На изменение возмущающих внешних сил они реагируют изменением напряжения мышц, направленным па сохранение и восстановление равновесия. Мышечные тяги не остаются неизменными, поэтому и уравновешивание ими возмущающих сил непостоянно. Мышечные тяги сами могут играть роль возмущающих сил, сами же выполняют функции останавливающих и восстанавливающих сил.
Таким образом, в живых организмах уравновешивание сил происходит при активном управлении силами биологического происхождения — мышечными тягами.
44.2. Равновесие колебательного типа
Для тела человека характерно равновесие колебательного типа (имеют место макро- и микроколебания) с отклонениями от среднего равновесного положения и возвращением к нему.
Тело человека при сохранении положения постоянно испытывает отклонения. Каждое дыхательное движение перемещает части тела. Каждое сокращение сердечной мышцы вызывает волну артериальной крови, которая сотрясает тело (па этом основан механический способ регистрации работы сердца). Постоянное рассогласование тяги мышечных групп вызывает медленные колебания (0,5-1 герц). Это относительно медленные движения в суставах; их можно записать на неподвижном листе бумаги при помощи карандаша, укреплённого остриём вверх на голове (цефалография). Наконец, любые возмущающие силы могут вызвать отклонение с последующим восстановлением положения. Всё это макроколебания, доступные зрительному наблюдению.
Кроме них существуют незаметные глазу микроколебания — «физиологический тремор» — с частотой от 7 до 9 герц. Причина микроколебаний — непостоянство мышечной тяги и реакция мышц на отклонения.
Раньше удерживание неподвижного положения тела силою мышц рассматривали как покой. С точки зрения механики, мышцы не совершали никакой работы (путь точек приложения сил мышц равен нулю). Физиологи, говоря о «статической работе» мышц, условно измеряли её величиной силы, помноженной на время её действия. Когда обнаружили колебательный режим сохранения положения неподвижного тела, стали полагать, что если имеется и сила тяги мышц и немалый путь точек их приложения при колебаниях, то совершается внешняя механическая работа по перемещению колеблющеюся тела.
44.3. Управление сохранением положения
Сохранение положения тела человека достигается управлением уравновешивающими силами при компенсаторных, амортизирующих и восстанавливающих движениях. В результате ОЦТ тела человека при колебаниях остаётся в зоне сохранения положения или возвращается в неё из зоны восстановления положения.
В сохранении положения для тела человека характерны колебания, в пределах которых действуют условия равновесия. Поэтому ОЦТ не занимает положения в одной единственной точке, а перемещается в определённых зонах.
Оптимальная зона положения ОЦТ — наиболее соответствует задаче сохранения требуемого положения. Соответствующее положение не всегда наиболее удобное; нередко оно даже более трудное, чем при известных отклонениях от требуемого; это самая малая зона.
Зона сохранения положения — перемещения ОЦТ в пределах этой зоны ещё не приводят к полному нарушению положения (например, над «потенциальной ямой» в ограниченно-устойчивом равновесии). Но приближение ОЦТ к её границам угрожает потерей равновесия; границы этой зоны определяются условиями равновесия системы тел и возможностями сохранения позы. Она больше, чем оптимальная зона, и включает её в свои пределы.
Зона восстановления положения — перемещение ОЦТ в эту зону для механической системы необратимо, так как в ней уже нарушаются условия равновесия. Неживое тело из этой зоны не может само вернуться в прежнее положение. А человек, использовав необходимые внешние силы, ещё может восстановить положение. Эта зона окружает снаружи зону сохранения положения, но не включает её в свои пределы.
Для лиц разной физической подготовленности зоны неодинаковы. Для менее подготовленных зона сохранения положения уменьшена; у них меньше площадь эффективной опоры, и они при меньших отклонениях потеряют возможность удержать позу. Для них зона восстановления положения также сужена, так как у них меньше сил и ловкости, чтобы суметь восстановить положение.
В борьбе за сохранение положения используется как ослабление действия возмущающих сил, так и усиление действия уравновешивающих сил.
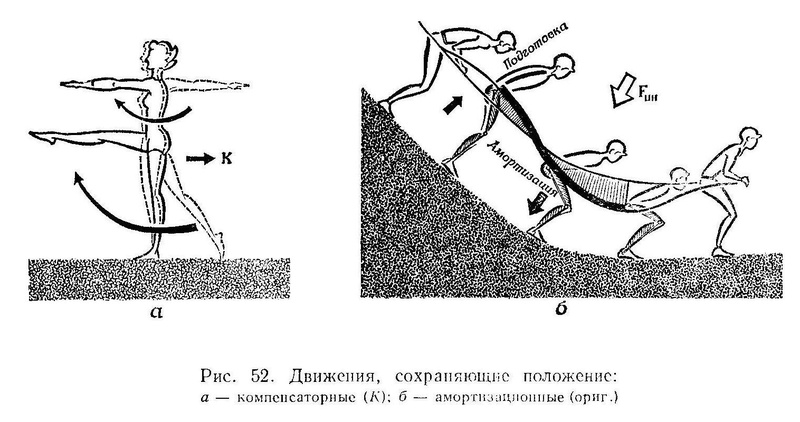
Компенсаторные* движения возникают в тот момент, когда возмущающие силы смещают часть звеньев тела. Компенсаторные движения предупреждают возможное выведение ОЦТ из зон сохранения положения или даже из оптимальной. Компенсаторные движения нейтрализуют эффект возмущающих сил. Они выполняются одновременно с движениями, грозящими потерей равновесия, и, как правило, автоматически (рис. 52, а).
* Компенсация (лат.) — возмещение.
Амортизирующие* движения позволяют ОЦТ перемещаться в зоне сохранения положения. Эти движения растягивают во времени действие возмущающих сил, уменьшают их эффект. Часто они увеличивают действие уравновешивающих сил. Они, как и компенсаторные движения, происходят одновременно с действием возмущающих сил (см. рис. 52, б).
* Амортизация (лат.) — погашение.
Восстанавливающие движения возвращают ОЦТ из зоны восстановления положения в зону сохранения положения. Они могут также перемещать ОЦТ и внутри последней (например, в оптимальную зону).
Все три группы движений, которые сохраняют и восстанавливают положение, нередко сочетаются в комбинированные действия. Например, когда у гимнастки, выполняющей упражнение на бревне, часть звеньев под действием силы тяжести отклоняется в одну сторону, другие в то же время компенсаторно смещаются в другую сторону. Ускоренные же движения звеньев создают внутренние силы инерции этих звеньев; передаваясь по кинематическим цепям к опоре, они изменяют и внешнюю силу — реакцию опоры (появляется горизонтальная составляющая). В последнем случае используются восстанавливающие движения.
Амортизирующие движения применяют при воздействии внешних сил: например, в борьбе — под воздействием противника. Они особенно важны при положении неподвижном относительно неинерциальной системы отсчёта, например когда в скоростном спуске на лыжах спортсмен стоит «неподвижно» на лыжах. Лыжи в движении находятся под действием увеличивающихся и уменьшающихся реакций опоры (изменения рельефа трассы). Заранее перемещая ОЦТ навстречу возмущающей силе, спортсмен затем уступающей работой мышц «поддаётся тормозя», перемещая ОЦТ в пределах зоны сохранения положения. Он постепенно посредством амортизирующей работы рассеивает энергию возмущающей силы.
В восстанавливающих движениях используются внешние силы, без них ОЦТ не может вернуться в зону сохранения положения. Такие силы можно вызвать ускоренным движением звеньев: например, при ходьбе по натянутой проволоке резким нажимом рукой на шест, удерживаемый горизонтально, — сила инерции шеста служит «опорой» для восстановления нарушающегося положения.
Восстанавливая положение, человек перемещает ОЦТ и опору: либо ОЦТ — над опорой, либо опору — под ОЦТ, либо и то и другое вместе.
Восстанавливающие движения нередко не только устраняют отклонения от равновесного положения, но и вызывают противоположное отклонение (гиперкоррекция). Новое восстановление (вторичная коррекция) вновь переходит через среднее положение; происходит ряд затухающих колебаний (балансирование).
Колебательные движения (микро- и макроколебания) в известном смысле также есть восстанавливающие движения, когда после отклонения звено возвращается к среднему положению.
Таким образом, сохранение положения — не покой, а активный управляемый двигательный процесс.
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.2.) § 44. Сохранение и восстановление положения тела человека
§ 44. СОХРАНЕНИЕ И ВОССТАНОВЛЕНИЕ ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА
Человек может не только сохранять равновесие, по и восстанавливать его в случаях нарушения. Отличие равновесия биомеханических систем от равновесия твёрдых физических тел заключается не в наличии особых законов механики для живых систем, а в более сложном их использовании благодаря особенностям живых систем.
44.1. Пассивное и активное уравновешивание
Уравновешивание происходит в неживых системах только пассивно, а в живых организмах — главным образом активно. Уравновешивающие силы могут действовать как собственно уравновешивающие, а также как и останавливающие отклонение и восстанавливающие положение.
В идеальных условиях в покое при равновесии физического тела все приложенные силы постоянны по величине, они уравновешены и тело сохраняет полный покой в инерциальной системе координат. При покое тела в неинерциальной системе отсчёта анализ равновесия осложняется необходимостью учёта фиктивных сил инерции. Но и в этом случае для неживых физических тел уравновешивание сил происходит чисто механически — пассивно.
В реальных условиях внешние силы нередко изменяются, и даже такой объект, как Останкинская телевизионная башня, сохраняя равновесие, при сильном ветре (переменная сила) не остаётся полностью неподвижным. Возмущающие силы вызывают деформации. И если действие возмущающих сил изменяется, то и противоположное действие уравновешивающих сил может измениться. Ветер деформирует Останкинскую башню; возникают силы упругой деформации, останавливающие отклонения, а потом и восстанавливающие её форму; башня при ветре раскачивается.
Пассивное уравновешивание сил происходит не только при полном покое, но и при возможных отклонениях (колебаниях).
Живые организмы, в том числе и человек, уравновешивают внешние силы не только пассивно, но и активно — силами мышечной тяги. На изменение возмущающих внешних сил они реагируют изменением напряжения мышц, направленным па сохранение и восстановление равновесия. Мышечные тяги не остаются неизменными, поэтому и уравновешивание ими возмущающих сил непостоянно. Мышечные тяги сами могут играть роль возмущающих сил, сами же выполняют функции останавливающих и восстанавливающих сил.
Таким образом, в живых организмах уравновешивание сил происходит при активном управлении силами биологического происхождения — мышечными тягами.
44.2. Равновесие колебательного типа
Для тела человека характерно равновесие колебательного типа (имеют место макро- и микроколебания) с отклонениями от среднего равновесного положения и возвращением к нему.
Тело человека при сохранении положения постоянно испытывает отклонения. Каждое дыхательное движение перемещает части тела. Каждое сокращение сердечной мышцы вызывает волну артериальной крови, которая сотрясает тело (па этом основан механический способ регистрации работы сердца). Постоянное рассогласование тяги мышечных групп вызывает медленные колебания (0,5-1 герц). Это относительно медленные движения в суставах; их можно записать на неподвижном листе бумаги при помощи карандаша, укреплённого остриём вверх на голове (цефалография). Наконец, любые возмущающие силы могут вызвать отклонение с последующим восстановлением положения. Всё это макроколебания, доступные зрительному наблюдению.
Кроме них существуют незаметные глазу микроколебания — «физиологический тремор» — с частотой от 7 до 9 герц. Причина микроколебаний — непостоянство мышечной тяги и реакция мышц на отклонения.
Раньше удерживание неподвижного положения тела силою мышц рассматривали как покой. С точки зрения механики, мышцы не совершали никакой работы (путь точек приложения сил мышц равен нулю). Физиологи, говоря о «статической работе» мышц, условно измеряли её величиной силы, помноженной на время её действия. Когда обнаружили колебательный режим сохранения положения неподвижного тела, стали полагать, что если имеется и сила тяги мышц и немалый путь точек их приложения при колебаниях, то совершается внешняя механическая работа по перемещению колеблющеюся тела.
44.3. Управление сохранением положения
Сохранение положения тела человека достигается управлением уравновешивающими силами при компенсаторных, амортизирующих и восстанавливающих движениях. В результате ОЦТ тела человека при колебаниях остаётся в зоне сохранения положения или возвращается в неё из зоны восстановления положения.
В сохранении положения для тела человека характерны колебания, в пределах которых действуют условия равновесия. Поэтому ОЦТ не занимает положения в одной единственной точке, а перемещается в определённых зонах.
Оптимальная зона положения ОЦТ — наиболее соответствует задаче сохранения требуемого положения. Соответствующее положение не всегда наиболее удобное; нередко оно даже более трудное, чем при известных отклонениях от требуемого; это самая малая зона.
Зона сохранения положения — перемещения ОЦТ в пределах этой зоны ещё не приводят к полному нарушению положения (например, над «потенциальной ямой» в ограниченно-устойчивом равновесии). Но приближение ОЦТ к её границам угрожает потерей равновесия; границы этой зоны определяются условиями равновесия системы тел и возможностями сохранения позы. Она больше, чем оптимальная зона, и включает её в свои пределы.
Зона восстановления положения — перемещение ОЦТ в эту зону для механической системы необратимо, так как в ней уже нарушаются условия равновесия. Неживое тело из этой зоны не может само вернуться в прежнее положение. А человек, использовав необходимые внешние силы, ещё может восстановить положение. Эта зона окружает снаружи зону сохранения положения, но не включает её в свои пределы.
Для лиц разной физической подготовленности зоны неодинаковы. Для менее подготовленных зона сохранения положения уменьшена; у них меньше площадь эффективной опоры, и они при меньших отклонениях потеряют возможность удержать позу. Для них зона восстановления положения также сужена, так как у них меньше сил и ловкости, чтобы суметь восстановить положение.
В борьбе за сохранение положения используется как ослабление действия возмущающих сил, так и усиление действия уравновешивающих сил.
Компенсаторные* движения возникают в тот момент, когда возмущающие силы смещают часть звеньев тела. Компенсаторные движения предупреждают возможное выведение ОЦТ из зон сохранения положения или даже из оптимальной. Компенсаторные движения нейтрализуют эффект возмущающих сил. Они выполняются одновременно с движениями, грозящими потерей равновесия, и, как правило, автоматически (рис. 52, а).
* Компенсация (лат.) — возмещение.
Амортизирующие* движения позволяют ОЦТ перемещаться в зоне сохранения положения. Эти движения растягивают во времени действие возмущающих сил, уменьшают их эффект. Часто они увеличивают действие уравновешивающих сил. Они, как и компенсаторные движения, происходят одновременно с действием возмущающих сил (см. рис. 52, б).
* Амортизация (лат.) — погашение.
Восстанавливающие движения возвращают ОЦТ из зоны восстановления положения в зону сохранения положения. Они могут также перемещать ОЦТ и внутри последней (например, в оптимальную зону).
Все три группы движений, которые сохраняют и восстанавливают положение, нередко сочетаются в комбинированные действия. Например, когда у гимнастки, выполняющей упражнение на бревне, часть звеньев под действием силы тяжести отклоняется в одну сторону, другие в то же время компенсаторно смещаются в другую сторону. Ускоренные же движения звеньев создают внутренние силы инерции этих звеньев; передаваясь по кинематическим цепям к опоре, они изменяют и внешнюю силу — реакцию опоры (появляется горизонтальная составляющая). В последнем случае используются восстанавливающие движения.
Амортизирующие движения применяют при воздействии внешних сил: например, в борьбе — под воздействием противника. Они особенно важны при положении неподвижном относительно неинерциальной системы отсчёта, например когда в скоростном спуске на лыжах спортсмен стоит «неподвижно» на лыжах. Лыжи в движении находятся под действием увеличивающихся и уменьшающихся реакций опоры (изменения рельефа трассы). Заранее перемещая ОЦТ навстречу возмущающей силе, спортсмен затем уступающей работой мышц «поддаётся тормозя», перемещая ОЦТ в пределах зоны сохранения положения. Он постепенно посредством амортизирующей работы рассеивает энергию возмущающей силы.
В восстанавливающих движениях используются внешние силы, без них ОЦТ не может вернуться в зону сохранения положения. Такие силы можно вызвать ускоренным движением звеньев: например, при ходьбе по натянутой проволоке резким нажимом рукой на шест, удерживаемый горизонтально, — сила инерции шеста служит «опорой» для восстановления нарушающегося положения.
Восстанавливая положение, человек перемещает ОЦТ и опору: либо ОЦТ — над опорой, либо опору — под ОЦТ, либо и то и другое вместе.
Восстанавливающие движения нередко не только устраняют отклонения от равновесного положения, но и вызывают противоположное отклонение (гиперкоррекция). Новое восстановление (вторичная коррекция) вновь переходит через среднее положение; происходит ряд затухающих колебаний (балансирование).
Колебательные движения (микро- и макроколебания) в известном смысле также есть восстанавливающие движения, когда после отклонения звено возвращается к среднему положению.
Таким образом, сохранение положения — не покой, а активный управляемый двигательный процесс.
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Re: Биомеханика. Сохранение положений тела
автор Игорь Вс Мар 19, 2017 11:27 am
Донской Д.Д. Биомеханика с основами спортивной техники. — М.: ФиС, 1971
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.3.) § 45. Последовательность разбора положений тела
Последовательность разбора положений тела включает определение: положения тела, возмущающих и уравновешивающих сил, условий устойчивости положения, условий работы мышц при движении и дыхании, оценки эффективности выполнения упражнения.
45.1. Определение положения тела
Прежде всего определяется конфигурация тела в сохраняемом положении — его поза. Она устанавливается по промеру (схема позы) и в случае необходимости описывается. Далее определяется ориентация тела в пространстве: как расположена в теле условная ось, ориентированы в пространстве и расположены относительно неё части тела. Например, продольная ось выпрямленного тела вертикальна, тело расположено головой вниз. Наконец, определяется отношение тела к опоре (верхняя, нижняя, боковая, смешанная), какие звенья опорные. Например, опора нижняя, опорные звенья — кисти рук (стойка па руках). Без этих исходных данных нельзя судить о возможностях сохранения положения.
45.2. Возмущающие и уравновешивающие силы
К звеньям тела приложены силы тяжести, реакции опоры и мышечной тяги. Чтобы определить их действие, нужно узнать расположение центров тяжести звеньев, систем звеньев, а также всего тела и соответствующие места опоры. Установив действие сил тяжести, их моментов относительно точек опоры, определяют, какое воздействие оказывают эти силы и их моменты на тело человека, т.е. возмущающее или уравновешивающее. По их соотношениям выясняют, какие мышцы и как участвуют в сохранении положения. Это очень важно и вместе с тем не просто. Анализ только с позиций механики недостаточен.
Во-первых, значительная часть мышц относится к многосуставным. Поэтому их напряжение зависит не только от действия сил тяжести, но и от позы тела — положения частей тела в смежных суставах.
Во-вторых, мышцы выполняют не только удерживающую работу (против моментов силы тяжести) и укрепляющую (против действия сил тяжести на разрыв), но и фиксирующую (совместным действием групп мышц-антагонистов сохраняют позу в суставах).
В-третьих, многие мышцы напрягаются не только вследствие рефлекса на действие механических сил, приложенных к данному звену, но и в результате рефлекторных воздействий с отдельных частей двигательного аппарата (рефлексы позы).
Механический анализ дополняется электромиографическими данными; это может намного повысить достоверность заключений. При значительных нагрузках (большие отягощения, трудные позы) напрягаются практически почти все мышцы тела.
45.3. Условия устойчивости положения
Оценить условия устойчивости помогают определения углов устойчивости и равновесия, моментов опрокидывающих (или отклоняющих) и моментов устойчивости и их соотношений (коэффициенты устойчивости). Однако оценка устойчивости будет неполной, если не учесть возможностей сохранения позы (фиксация суставов), а также движений, сохраняющих положение (компенсаторных и амортизирующих) и восстанавливающих его. Только совокупность всех этих данных поможет достаточно обоснованно оценить устойчивость положения.
45.4. Условия работы мышц при движении и дыхании
Далее нужно перейти к оценке работы мышц с учётом её непосредственной зависимости от внешних сил и взаимодействия групп мышц, а также рефлекторного сопутствующего напряжения. Из-за невозможности измерить силу тяги каждой мышцы и плечо этой силы определение напряжения мышц делается, обычно описательно и весьма приближённо. Здесь большее значение имеет биодинамический анализ взаимодействий напряжённых мышц. Особый интерес представляют напряжения вспомогательных дыхательных мышц. Если они напряжены для сохранения положения тела, то чаще всего ограничивают возможности дыхательных движений. При крайних степенях напряжения вспомогательных дыхательных мышц дыхательные движения практически прекращаются.
45.5. Оценка эффективности выполнения упражнения
По всем данным разбора положения нужно получить оценку эффективности выполнения упражнения. Из этой оценки будут вытекать рекомендации по усовершенствованию как выполнения положения, так и самого положения.
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.1.) Равновесие тела человека
(6.1.3.) § 45. Последовательность разбора положений тела
§ 45. ПОСЛЕДОВАТЕЛЬНОСТЬ РАЗБОРА ПОЛОЖЕНИЙ ТЕЛА
Последовательность разбора положений тела включает определение: положения тела, возмущающих и уравновешивающих сил, условий устойчивости положения, условий работы мышц при движении и дыхании, оценки эффективности выполнения упражнения.
45.1. Определение положения тела
Прежде всего определяется конфигурация тела в сохраняемом положении — его поза. Она устанавливается по промеру (схема позы) и в случае необходимости описывается. Далее определяется ориентация тела в пространстве: как расположена в теле условная ось, ориентированы в пространстве и расположены относительно неё части тела. Например, продольная ось выпрямленного тела вертикальна, тело расположено головой вниз. Наконец, определяется отношение тела к опоре (верхняя, нижняя, боковая, смешанная), какие звенья опорные. Например, опора нижняя, опорные звенья — кисти рук (стойка па руках). Без этих исходных данных нельзя судить о возможностях сохранения положения.
45.2. Возмущающие и уравновешивающие силы
К звеньям тела приложены силы тяжести, реакции опоры и мышечной тяги. Чтобы определить их действие, нужно узнать расположение центров тяжести звеньев, систем звеньев, а также всего тела и соответствующие места опоры. Установив действие сил тяжести, их моментов относительно точек опоры, определяют, какое воздействие оказывают эти силы и их моменты на тело человека, т.е. возмущающее или уравновешивающее. По их соотношениям выясняют, какие мышцы и как участвуют в сохранении положения. Это очень важно и вместе с тем не просто. Анализ только с позиций механики недостаточен.
Во-первых, значительная часть мышц относится к многосуставным. Поэтому их напряжение зависит не только от действия сил тяжести, но и от позы тела — положения частей тела в смежных суставах.
Во-вторых, мышцы выполняют не только удерживающую работу (против моментов силы тяжести) и укрепляющую (против действия сил тяжести на разрыв), но и фиксирующую (совместным действием групп мышц-антагонистов сохраняют позу в суставах).
В-третьих, многие мышцы напрягаются не только вследствие рефлекса на действие механических сил, приложенных к данному звену, но и в результате рефлекторных воздействий с отдельных частей двигательного аппарата (рефлексы позы).
Механический анализ дополняется электромиографическими данными; это может намного повысить достоверность заключений. При значительных нагрузках (большие отягощения, трудные позы) напрягаются практически почти все мышцы тела.
45.3. Условия устойчивости положения
Оценить условия устойчивости помогают определения углов устойчивости и равновесия, моментов опрокидывающих (или отклоняющих) и моментов устойчивости и их соотношений (коэффициенты устойчивости). Однако оценка устойчивости будет неполной, если не учесть возможностей сохранения позы (фиксация суставов), а также движений, сохраняющих положение (компенсаторных и амортизирующих) и восстанавливающих его. Только совокупность всех этих данных поможет достаточно обоснованно оценить устойчивость положения.
45.4. Условия работы мышц при движении и дыхании
Далее нужно перейти к оценке работы мышц с учётом её непосредственной зависимости от внешних сил и взаимодействия групп мышц, а также рефлекторного сопутствующего напряжения. Из-за невозможности измерить силу тяги каждой мышцы и плечо этой силы определение напряжения мышц делается, обычно описательно и весьма приближённо. Здесь большее значение имеет биодинамический анализ взаимодействий напряжённых мышц. Особый интерес представляют напряжения вспомогательных дыхательных мышц. Если они напряжены для сохранения положения тела, то чаще всего ограничивают возможности дыхательных движений. При крайних степенях напряжения вспомогательных дыхательных мышц дыхательные движения практически прекращаются.
45.5. Оценка эффективности выполнения упражнения
По всем данным разбора положения нужно получить оценку эффективности выполнения упражнения. Из этой оценки будут вытекать рекомендации по усовершенствованию как выполнения положения, так и самого положения.
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Re: Биомеханика. Сохранение положений тела
автор Игорь Вс Мар 19, 2017 11:35 am
Донской Д.Д. Биомеханика с основами спортивной техники. — М.: ФиС, 1971
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.2.) Виды статичных упражнений
(6.2.1.) § 46. Положения при верхней опоре
Положения тела различают по их расположению относительно опоры. В положениях при верхней опоре (подвес) тело подвешено, силы тяжести действуют в направлении возможного отрыва от опоры и тело находится в устойчивом равновесии. В положениях при нижней опоре силы тяжести прижимают тело, которое находится в ограниченно-устойчивом равновесии, к опоре. Существует немалое количество положений тела, при которых оно более сложно расположено относительно опоры (одновременно верхняя и нижняя опоры, боковая опора). В виде самостоятельных упражнений, кроме гимнастики, статичные положения не применяются. Они часто служат исходными и конечными положениями, а также включаются как фазы неподвижных положений в сложные действия.
48.1. Вис на перекладине
В этом положении всё тело ориентировано вертикально, выпрямлено, несколько разогнуто в тазобедренных и межпозвоночных суставах, носки стоп оттянуты (подошвенное сгибание), руки вытянуты над головой вверх, согнутые пальцы кистей охватывают перекладину (рис. 53, а).
Общий центр тяжести тела гимнаста расположен в вертикальной плоскости перекладины. Следовательно, сила тяжести тела относительно места опоры своего момента не имеет. Тело находится в устойчивом равновесии. К поясу верхних конечностей как бы подвешены тягой мышц нижние отделы туловища. Мышцы лучезапястных и плечевых суставов совершают укрепляющую работу, а мышцы суставов нижних конечностей — фиксирующую. На рис. 53, а видно, что, по сути дела, все группы мышц тела так или иначе напряжены. Это при активном выполнении виса — в соответствии с требованиями гимнастики. При попытке расслабить как можно больше мышц в висе получится не строго определённая поза: моменты сил тяжести опустят ЦТ многих звеньев в более низкое положение.
Условия дыхания не трудные. Напряжение мышц и затраты энергии невелики. Поднятые вверх руки и лопатки несколько растягивают мышцы вдоха (большие грудные), фиксируют грудную клетку.
Положение в висе служит исходным для многих упражнений на перекладине. Это поза готовности к активному действию. Она даёт, как и другие гимнастические положения, ощущение правильности требуемого положения во многих суставах.
46.2. Горизонтальный вис сзади
В этом положении опора у тела верхняя и оно ориентировано горизонтально (рис. 53, б). ОЦТ располагается под местами хвата, поэтому в усилиях для противодействия моменту силы тяжести всего тела нет необходимости. Но для сохранения позы, для удержания туловища и ног в горизонтальном положении в плечевых суставах нужны чрезвычайно большие моменты сил сгибателей плеч в этом положении. Такие моменты сил могут создавать лишь спортсмены, получившие силовую подготовку.
Весьма значительно и напряжение мышц задней поверхности тела, которые удерживают таз и ноги в положении, близком к горизонтальному.
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.2.) Виды статичных упражнений
(6.2.1.) § 46. Положения при верхней опоре
ВИДЫ СТАТИЧНЫХ УПРАЖНЕНИЙ
Положения тела различают по их расположению относительно опоры. В положениях при верхней опоре (подвес) тело подвешено, силы тяжести действуют в направлении возможного отрыва от опоры и тело находится в устойчивом равновесии. В положениях при нижней опоре силы тяжести прижимают тело, которое находится в ограниченно-устойчивом равновесии, к опоре. Существует немалое количество положений тела, при которых оно более сложно расположено относительно опоры (одновременно верхняя и нижняя опоры, боковая опора). В виде самостоятельных упражнений, кроме гимнастики, статичные положения не применяются. Они часто служат исходными и конечными положениями, а также включаются как фазы неподвижных положений в сложные действия.
§ 46. ПОЛОЖЕНИЯ ПРИ ВЕРХНЕЙ ОПОРЕ
48.1. Вис на перекладине
В этом положении всё тело ориентировано вертикально, выпрямлено, несколько разогнуто в тазобедренных и межпозвоночных суставах, носки стоп оттянуты (подошвенное сгибание), руки вытянуты над головой вверх, согнутые пальцы кистей охватывают перекладину (рис. 53, а).
Общий центр тяжести тела гимнаста расположен в вертикальной плоскости перекладины. Следовательно, сила тяжести тела относительно места опоры своего момента не имеет. Тело находится в устойчивом равновесии. К поясу верхних конечностей как бы подвешены тягой мышц нижние отделы туловища. Мышцы лучезапястных и плечевых суставов совершают укрепляющую работу, а мышцы суставов нижних конечностей — фиксирующую. На рис. 53, а видно, что, по сути дела, все группы мышц тела так или иначе напряжены. Это при активном выполнении виса — в соответствии с требованиями гимнастики. При попытке расслабить как можно больше мышц в висе получится не строго определённая поза: моменты сил тяжести опустят ЦТ многих звеньев в более низкое положение.
Условия дыхания не трудные. Напряжение мышц и затраты энергии невелики. Поднятые вверх руки и лопатки несколько растягивают мышцы вдоха (большие грудные), фиксируют грудную клетку.
Положение в висе служит исходным для многих упражнений на перекладине. Это поза готовности к активному действию. Она даёт, как и другие гимнастические положения, ощущение правильности требуемого положения во многих суставах.
46.2. Горизонтальный вис сзади
В этом положении опора у тела верхняя и оно ориентировано горизонтально (рис. 53, б). ОЦТ располагается под местами хвата, поэтому в усилиях для противодействия моменту силы тяжести всего тела нет необходимости. Но для сохранения позы, для удержания туловища и ног в горизонтальном положении в плечевых суставах нужны чрезвычайно большие моменты сил сгибателей плеч в этом положении. Такие моменты сил могут создавать лишь спортсмены, получившие силовую подготовку.
Весьма значительно и напряжение мышц задней поверхности тела, которые удерживают таз и ноги в положении, близком к горизонтальному.
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18

Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Re: Биомеханика. Сохранение положений тела
автор Игорь Вс Мар 19, 2017 11:38 am
Донской Д.Д. Биомеханика с основами спортивной техники. — М.: ФиС, 1971
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.2.) Виды статичных упражнений
(6.2.2.) § 47. Положения при нижней опоре
47.1. Положение стоя
При нижней опоре силы тяжести действуют на тело совместно с силами реакции опоры и направлены преимущественно на сжатие. Вместе с тем моменты сил тяжести требуют удерживающей работы мышц, поскольку линии сил тяжести звеньев большей частью не проходят через центры их опоры (рис. 54, а).
Хотя линия действия силы тяжести всего тела при стоянии всегда проходит через площадь эффективной опоры, сохранение положения стоя вовсе не пассивное. Вес расположенных выше частей тела действует на части, расположенные ниже. Моменты сил мышц удерживают в каждом сочленении все верхние звенья против действия моментов их сил тяжести. Линия действия силы тяжести всего тела (кроме стоп) чаще всего проходит впереди оси голеностопных суставов. Подошвенные сгибатели стоп совершают удерживающую работу, регулируя (обеспечивая противодействие моменту силы тяжести тела) наклон продольной оси тела.
Относительно небольшие изменения взаимного расположения верхних звеньев сопровождаются компенсаторными перемещениями нижних. Это особенно наглядно проявляется при асимметричном стоянии. Опорная нога, переразогнутая в коленном суставе, принимает на себя вес почти всего тела. Относительно тазобедренного сустава этой ноги таз опущен в сторону разгруженной ноги. Его удерживают растянутые отводящие мышцы бедра. Возникают характерные изгибы позвоночника в поперечной плоскости. Они сопровождаются также опусканием верхней половины туловища (с поясом верхних конечностей) в сторону опорной ноги. Большая часть мышц, выполняющих удерживающую работу, растянута, звенья тела как бы «пассивно» подвешены на них. Все отклонения положений звеньев (по сравнению с симметричным стоянием) взаимно компенсированы.
Переход к прямостоянию и прямохождению человека сопровождался появлением у него поясничного лордоза (шейный лордоз и грудной кифоз имеются и у животных). Поясничный лордоз связан с положением таза. Увеличение угла наклона таза изменяет все изгибы позвоночника, что необходимо учитывать при формировании правильной осанки.
47.2. Заднее равновесие
В этом положении звенья тела (кроме опорной ноги) расположены ближе к горизонтали, чем к вертикали (рис. 54, б). Следовательно, у них большие моменты сил тяжести. В тазобедренных и межпозвоночных суставах положения крайние. Мышцы, обеспечивающие крайние положения, в то же время несут большую нагрузку в удерживающей работе против моментов сил тяжести.
Несколько облегчает удержание тела (по сравнению с горизонтальным висом сзади, см. 46.2) уравновешивание туловища с головой и руками левой ногой. Отчётливо наблюдается компенсаторное отклонение продольной оси опорной ноги назад, вследствие чего линия действия силы тяжести тела проходит через площадь эффективной опоры.
Часть 2. Биомеханика физических упражнений
Глава 6. Сохранение положений тела
(6.2.) Виды статичных упражнений
(6.2.2.) § 47. Положения при нижней опоре
§ 47. ПОЛОЖЕНИЯ ПРИ НИЖНЕЙ ОПОРЕ
47.1. Положение стоя
При нижней опоре силы тяжести действуют на тело совместно с силами реакции опоры и направлены преимущественно на сжатие. Вместе с тем моменты сил тяжести требуют удерживающей работы мышц, поскольку линии сил тяжести звеньев большей частью не проходят через центры их опоры (рис. 54, а).
Хотя линия действия силы тяжести всего тела при стоянии всегда проходит через площадь эффективной опоры, сохранение положения стоя вовсе не пассивное. Вес расположенных выше частей тела действует на части, расположенные ниже. Моменты сил мышц удерживают в каждом сочленении все верхние звенья против действия моментов их сил тяжести. Линия действия силы тяжести всего тела (кроме стоп) чаще всего проходит впереди оси голеностопных суставов. Подошвенные сгибатели стоп совершают удерживающую работу, регулируя (обеспечивая противодействие моменту силы тяжести тела) наклон продольной оси тела.
Относительно небольшие изменения взаимного расположения верхних звеньев сопровождаются компенсаторными перемещениями нижних. Это особенно наглядно проявляется при асимметричном стоянии. Опорная нога, переразогнутая в коленном суставе, принимает на себя вес почти всего тела. Относительно тазобедренного сустава этой ноги таз опущен в сторону разгруженной ноги. Его удерживают растянутые отводящие мышцы бедра. Возникают характерные изгибы позвоночника в поперечной плоскости. Они сопровождаются также опусканием верхней половины туловища (с поясом верхних конечностей) в сторону опорной ноги. Большая часть мышц, выполняющих удерживающую работу, растянута, звенья тела как бы «пассивно» подвешены на них. Все отклонения положений звеньев (по сравнению с симметричным стоянием) взаимно компенсированы.
Переход к прямостоянию и прямохождению человека сопровождался появлением у него поясничного лордоза (шейный лордоз и грудной кифоз имеются и у животных). Поясничный лордоз связан с положением таза. Увеличение угла наклона таза изменяет все изгибы позвоночника, что необходимо учитывать при формировании правильной осанки.
47.2. Заднее равновесие
В этом положении звенья тела (кроме опорной ноги) расположены ближе к горизонтали, чем к вертикали (рис. 54, б). Следовательно, у них большие моменты сил тяжести. В тазобедренных и межпозвоночных суставах положения крайние. Мышцы, обеспечивающие крайние положения, в то же время несут большую нагрузку в удерживающей работе против моментов сил тяжести.
Несколько облегчает удержание тела (по сравнению с горизонтальным висом сзади, см. 46.2) уравновешивание туловища с головой и руками левой ногой. Отчётливо наблюдается компенсаторное отклонение продольной оси опорной ноги назад, вследствие чего линия действия силы тяжести тела проходит через площадь эффективной опоры.
Последний раз редактировалось: Игорь (Вс Мар 19, 2017 11:42 am), всего редактировалось 2 раз(а)
Игорь- Сообщения : 193
Дата регистрации : 2017-02-18

Игорь- Сообщения : 193
Дата регистрации : 2017-02-18
Страница 1 из 1
Права доступа к этому форуму:
Вы не можете отвечать на сообщения